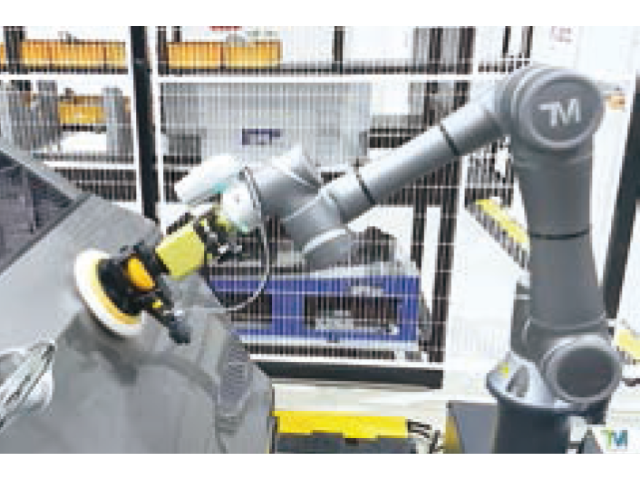
湖北物流协作机器人系统集成工作站
实现协作机器人系统集成的远程监控和管理,可以采用以下步骤:1.确定监控和管理的需求:首先需要明确需要监控和管理哪些方面,例如机器人的运行状态、任务执行情况、故障报警等。2.选择合适的远程监控和管理软件:根据需求选择合适的远程监控和管理软件,例如ROS(机器人操作系统)、VNC(虚拟网络计算机)等。3.配置机器人系统:将机器人系统与远程监控和管理软件进行集成,配置相关参数和权限。4.远程连接机器人系统:通过网络连接远程监控和管理软件与机器人系统,实现远程监控和管理。5.实时监控和管理机器人系统:通过远程监控和管理软件实时监控和管理机器人系统,及时发现和解决问题,提高机器人系统的运行效率和稳定性。6.数据分析和优化:通过对机器人系统的数据进行分析和优化,不断提高机器人系统的性能和效率。借助先进的算法和传感器技术,协作机器人系统集成实现精确的定位和导航。湖北物流协作机器人系统集成工作站

协作机器人系统集成的成本效益因多种因素而异,包括机器人的类型、应用场景、集成方式、生产线的规模和复杂度等。一般来说,协作机器人系统集成的成本包括机器人本身的成本、集成和编程的成本、培训和维护的成本等。但是,协作机器人系统的使用可以带来以下成本效益:1.提高生产效率:协作机器人可以与人类工作人员协同工作,提高生产效率和质量。2.减少人力成本:协作机器人可以替代一些重复性、危险或繁琐的工作,减少人力成本。3.减少错误率:协作机器人可以减少人为错误,提高生产质量。4.提高生产灵活性:协作机器人可以快速适应生产线的变化,提高生产灵活性。5.增加生产线的安全性:协作机器人可以减少人员受伤的风险,增加生产线的安全性。总的来说,协作机器人系统集成的成本效益是显着的,可以提高生产效率、降低成本、提高质量和安全性,增强企业的竞争力。浙江工业协作机器人系统集成费用协作机器人系统集成提供定制化的解决方案,满足各种行业和企业的特定需求。

协作机器人系统集成可以在以下方面提高生产效率和减少人工成本:1.自动化生产流程:协作机器人可以自动完成重复性、繁琐或危险的任务,从而减少人工干预,提高生产效率。2.人机协作:协作机器人可以与人类工作人员协同工作,共同完成任务,提高生产效率和质量。3.灵活性:协作机器人可以根据生产需求进行快速调整和重新编程,从而提高生产灵活性和适应性。4.节约成本:协作机器人可以减少人工成本,同时降低生产过程中的错误率和损失,从而节约成本。5.提高安全性:协作机器人可以在危险环境中代替人类工作,从而提高生产安全性和保障工人的健康。总之,协作机器人系统集成可以提高生产效率、降低成本、提高生产质量和安全性,是未来工业生产的重要趋势。
协作机器人系统集成在以下几个领域有广泛的应用:1.制造业:协作机器人可以与人类工人协同完成生产线上的任务,提高生产效率和质量。2.物流和仓储:协作机器人可以与人类工人一起完成物流和仓储任务,如搬运、装卸、分拣等。3.医疗保健:协作机器人可以与医护人员协同完成手术、康复训练等任务,提高医疗服务的效率和质量。4.农业:协作机器人可以与农民协同完成农业生产任务,如种植、收割、施肥等。5.建筑和维修:协作机器人可以与工程师和技术人员协同完成建筑和维修任务,如清洁、维修、安装等。6.教育和娱乐:协作机器人可以作为教育和娱乐工具,与人类进行互动和协作,提高学习和娱乐的体验。在生产线上,协作机器人系统集成已经成为不可或缺的一部分。
协作机器人系统集成中的传感器和执行器是相互协作的。传感器可以感知环境和机器人的状态,例如测量物体的位置、形状、颜色、温度等。执行器则可以根据传感器的反馈和程序指令,控制机器人的动作,例如移动、抓取、放置等。在协作机器人系统中,传感器和执行器的工作流程如下:1.传感器感知环境和机器人状态,将数据传输给控制系统。2.控制系统根据传感器数据和程序指令,计算机器人的动作和路径。3.执行器根据控制系统的指令,控制机器人进行相应的动作,例如移动、抓取、放置等。4.传感器再次感知机器人的状态和环境变化,将数据传输给控制系统。5.控制系统根据传感器数据和程序指令,调整机器人的动作和路径,使其更加准确和高效。通过传感器和执行器的相互协作,协作机器人系统可以实现更加智能化、高效化的工作。通过智能化的数据处理和分析,协作机器人系统集成提供关键的商业洞察和预测。浙江智能协作机器人系统集成调试测试
协作机器人系统集成,让机器人与人类更有效地协同工作,提升生产效率。湖北物流协作机器人系统集成工作站
要有效地与第三方设备进行整合以实现协作机器人系统集成,可以采取以下步骤:1.确定集成目标:明确需要集成的第三方设备和集成目标,例如数据传输、控制指令、传感器数据等。2.选择合适的通信协议:根据集成目标选择合适的通信协议,例如TCP/IP、Modbus、CAN等。3.开发集成接口:根据通信协议开发集成接口,实现数据传输和控制指令的交互。4.测试集成接口:进行集成接口测试,确保数据传输和控制指令的准确性和稳定性。5.集成第三方设备:将开发好的集成接口与第三方设备进行集成,实现协作机器人系统的集成。6.进行系统测试:进行系统测试,确保协作机器人系统的稳定性和可靠性。7.不断优化:根据实际应用情况不断优化集成接口和协作机器人系统,提高系统的性能和效率。湖北物流协作机器人系统集成工作站
上一篇: 广东物流协作机器人系统集成品牌
下一篇: 浙江精密协作机器人系统集成工作站