AI档案馆规划建设
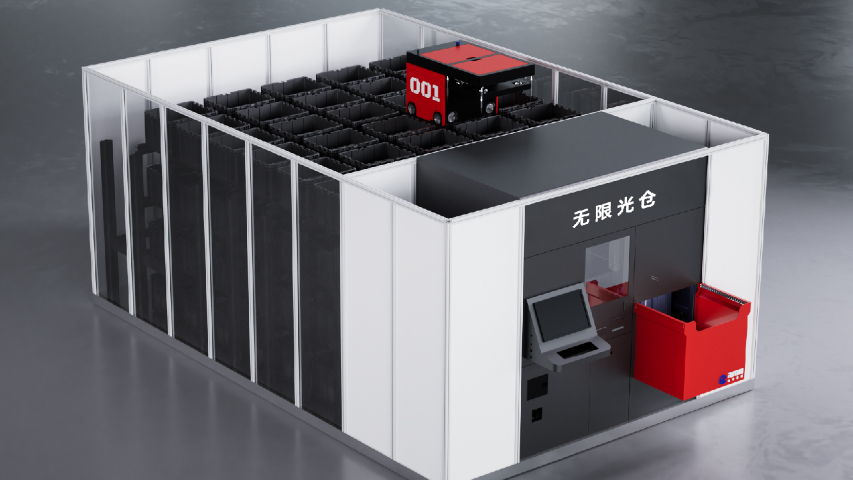
智能立方仓智慧档案库房的建设,依托先进的机器人技术和集成控制系统,实现了库房运营的高智能化与自动化管理。该系统能够连续不断地执行料箱的入库、存储、检索及出库等一系列操作,全程无需人工直接干预,明显提升了库房作业效率与档案处理的精确度。更值得一提的是,智能化管理系统能够实时监控档案的位置与状态信息,为档案的迅速定位与调阅创造了极大便利。同时,该系统有效规避了传统档案管理中繁琐的清点、普查等流程,大幅削减了人力成本,降低了人为错误的风险,使得档案管理迈向了更高效、更精细的新阶段。立方仓智慧档案馆,比传统密集架2倍扩容,智能管理让盘库成为历史,人库分离保安全。AI档案馆规划建设
档案馆
立方仓的优势源自其强大的算法系统。在我们的魔方系统中,算法需要实时监控和计算,确保每一箱档案的下一个存储位置都是更优先的。这涉及对大量数据的即时处理,包括订单需求、库存状态、档案属性和仓库环境等多重因素。我们的算法融合了人工智能、机器学习和更优化理论等前沿技术。通过复杂的动态优化和预测模型,算法能够实时调整档案的位置,更大化空间利用率和作业效率。机器人在执行任务时,算法即时计算更优路径,避免拥堵和碰撞;根据档案的周转率和优先级,动态调整存储策略,确保高频出库的档案存放在更便捷的位置。这种高度复杂且精密的算法体系,使立方仓的智能仓储解决方案能够游刃有余地应对复杂多变的仓储环境。大幅提升了存取效率和空间利用率,满足了客户对高效、可靠、智能化仓储管理的致极追求。AI人工智能档案平台一站式AI人工智能服务立方仓高密度无人智慧档案馆,不仅免去了盘库的繁琐,更实现了存储容量翻倍增长。

立方仓作为一种革新性的高密度智慧档案管理方案,彻底颠覆了传统档案馆的存储模式。它摒弃了密集架式存储所需的大量人行走道与顶部空间,通过创新的网格式设计及层层堆叠的档案料箱,实现了空间利用的明显提升,其存储效率可达传统密集架式的2.5至4倍。在高达十几米的立方仓内,机器人队列高效运作,约80%的时间直接服务于订单处理,而订单准备则巧妙安排在休息与夜间时段,确保资源充分利用且机器人无需等待任务。借助先进的仓库管理系统(WMS),货箱提前按优先级设置于顶部,实现了即时响应与无缝对接,操作人员无需等待机器人介入。更令人瞩目的是,立方仓系统具备即时提取能力,即便是底部货箱,提取时间也只需1分20秒,且通过灵活增加机器人数量即可轻松应对高频需求。以某6米高立方仓为例,其频繁出入库产品只占总体积的20%,超过三分之一的货箱无需挖掘即可直接取用,平均出库时间只需大约27秒,底部货箱使用率极低,只占所需货格的5%以内,充分展示了立方仓在智慧档案管理领域的超高效能。
为何选择立方仓?致极空间利用:采用高密度垂直堆叠,较传统存储方案提升4倍空间,无需穿梭巷道,空间利用更高效。超高效能:拥有多元取货路径,乐宝机器人顶层更优先路径运行,实现每平方米每小时5.5箱的高效存取,远超ACR与穿梭车系统,明显提升仓储效率。智能精确管理:集成智慧算法平台,实现货物随进随出,精确库存管理与决策支持,自动排单,避免胀库等问题。灵活扩容:建设灵活,无视层高、地形及承重限制,可按需增加机器人与工作站,跨楼层、跨区间无缝扩展,展现强大柔性扩展能力。低维护成本:系统设计注重维护便捷,每套系统配专属维护平台,便于监控、管理与故障排查,减少停机时间。乐宝机器人顶层运行,简化地面维护,加之低能耗设计,大幅降低运维成本,保障系统长期稳定高效运行。高密度无人智慧档案库房,用智能机器人实现自动传输档案、全时段实时检测、记录。
立方仓无人智慧档案馆项目,凭借其高科技的性的机器人技术,成功实现了多库区间的流畅穿梭与多车协同作业,显著提高了整体运作效率与快速响应能力。该项目的布局巧妙融合了空间高效利用与操作便利性的设计思路,充分展现了项目团队在智能化仓储解决方案领域的深厚造诣与创新精神。相较于传统的智能密集架,立方仓的存储容量实现了质的飞跃,是传统密集架的两倍之多,这种高密度的存储模式使得有限空间内的档案管理变得更为有序高效。在立方仓系统的推动下,传统查档流程中的时间成本得到了极大降低,档案出库时间已缩短至30秒以内,为用户提供了前所未有的便捷与高效体验。此外,该系统还具备智能优化存储布局的功能,能够根据档案的使用频率进行自动调整,进一步简化了工作流程。在安全性上,立方仓系统单独运行于局域网内,与业务网络实现物理隔离,同时采取了多重安全保障措施,确保数据接口接入与任务执行的安全可靠。智慧档案,尽在立方仓,存储容量是传统密集架的两倍,让传统密集架仓储时代成为过去式。智慧档案库房升级改造
方仓智能存储档案馆,安全存储无忧。AI档案馆规划建设
方仓智能存储系统采用了多路径网格棋盘式布局,仓库内部如同纵横交错的棋盘,机器人可以在多条路径上自由行驶。这种设计很大程度上增加了机器人的行驶路线,避免了拥堵现象。机器人有更多的选择来规划致极优先路线,减少运输时间;多个机器人可以在不同路径上并行作业,提升整体效率;系统还可以根据实时情况灵活调整机器人的路径规划,进一步优化效率。这种布局使得机器人将货物搬运到出口的速度呈几何倍数增长,显著提高了系统的吞吐量上限。AI档案馆规划建设
上一篇: 数字化档案平台十防建设
下一篇: 高密度无人档案柜设备厂家