陕西园区巡检机器人工程
提高定位地图质量,定位地图中定位点不得含有草坪或其他植物,因为草坪和植物会不断生长变化,导致定位失败。对于因为环境太单调、雷同引起的定位失败,可以在失败部位张贴标志图标,避免图像太过近似引起定位失败。采用高精度北斗或GPS硬件定位。加大智能巡检机器人的电池容量,比如由1000W·h加大到2000W·h,提高续航能力,或者也可以采用高倍率充电电池提高充电速度。巡检机器人在包括能源化工、商场、园区等各个领域都有广泛的应用,但是不同的领域和场景所面临的巡检要求和应用难点也不尽相同,因此需要根据具体需求和应用场景进行定制化的设计和应用。智能机器巡检机器人,就选上海洲和智能科技有限公司,有需求可以来电咨询!陕西园区巡检机器人工程
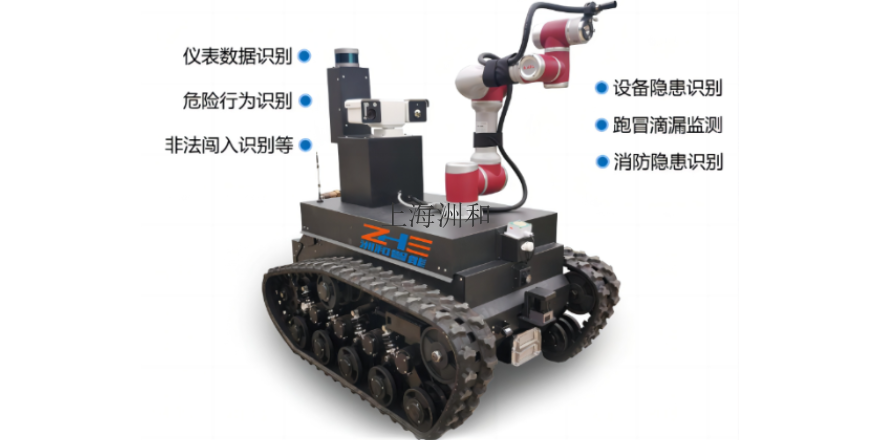
安保室内巡检机器人通常具备多种传感器和设备,如摄像头、红外线传感器、雷达、声音识别设备等,可以对周围环境进行感知和监测。这种机器人还拥有安保功能,例如监控巡逻、陌生人员报警、异常声音报警、夜间值守等。另外,一些安保巡检机器人还具备自主导航技术,可以通过自主导航技术来避开障碍物和识别路径,并使用地图和位置感知技术来确定其位置和方向。除此之外,安保巡检机器人还具有多种优势。首先,它们可以节约成本,虽然机器人的售价和维护费用高昂,但一台安保巡检机器人可以代替多个人类,并且可以24小时不停作业。其次,随着机器人技术的不断发展,机器人的成本反而会越来越低。此外,机器人还具有功能强大的优点,例如智能安保巡检机器人可以利用多种前沿技术实现各项功能,包括音视频对讲、室内无线导航、人机交互、人脸识别等。在应用领域方面,安保巡检机器人适用于多种行业,例如家庭、电商物流等。无论是在公共安全、工业设施、银行、机场等场所,还是在其他需要安保巡检的领域,这种机器人都可以得到广泛应用。总之,安保室内巡检机器人是一种具有多种优势和功能的机器人,在安保领域有着广泛的应用前景。河南AI巡检机器人价格上海洲和智能科技有限公司为您提供AI巡检机器人,欢迎新老客户来电!

定位模块:可以通过对激光雷达(Laserradar)和起宽带UWB)数据的解析来获得机器人的相关定位信息,但其会优先借助波算法(Filteringalgorithm)来对UWB的数据予以优化,从而使所获取的定位信息更加精确稳定。还可以运用ROS的ACML包对线管数据再次加以计算,从而获得定位信息。该模块既能够对两个定位信息予以单独使用,也可以融合使用。导航模块:主要分为手动控制、局部路径规划以及全局路径规划,通过局部、全局两个子模块彼此间的协同配合能实现实时路径规划。但当机器人接收到手动控制命令后,此时机器人的控制权将被工作人员所接管,从而自动切换至手动模式状态,以供工作人员手动规划机器人的巡检路线。巡检模块:机器人在接收到巡检任务后将自动规划路线开始巡检工作,期间依靠多个传感器来判断水平方向是否存在障碍物或不可触碰高危设备。同时根据巡检任务的实际需要,相关指令能够及时传达至摄像头以及升降云台,从而对其升降高度以及拍摄角度进行相应调整,确保拍摄效果。巡检功能主要还能完成危险情况紧急制动、通过升降门、设备拍照、手动控制等等机器人功能。
防爆轮式巡检机器人已在中石油、中石化等石化企业取得了广泛应用,完成了对泄压罐、污油罐、密度计、过滤器、减压间、质量流量计等输油设备的巡检工作,数据采集准确,图像清晰,故障报警及时。实际应用结果表明,智能巡检机器人工作可靠,运行状况稳定,节省了大量的人力物力,完全替代了人工巡检工作,减员增效取得明显效果,达到了无人值守的目的,取得了较好的经济效益。五、巡检机器人行业商业模式分析本体生产+系统集成模式是当下巡检机器人企业发展趋势,也是当前具备较高盈利水平的商业模式。目前国内外较为成功的企业都采用了“本体生产+系统集成”的全产业链模式,或是正在向上下游逐步渗透,实现全产业链模式的转程。上海洲和智能科技有限公司致力于提供轨道巡检机器人,有需求可以来电咨询!

软件系统软件系统包括中控机和上位机,主要是底盘以上的层级。其中中控机主要负责控制底盘运动、摄像头拍照以及控制云台升降等中心任务,上位机主要负责供用户向机器人发布巡检任务、查看机器人状态及展示运检地图等。操作系统:为了机器人的各种功能能得以顺利实现,可以使用机器人操作系统ROS,这是专门针对机器人而开发出来的一种系统,是一套开源的系统框架,具有通用性、开源性、复用性、社区性等诸多优点,由于具备诸多功能,同时能用于商用或研究,因此有利于降低研究开发成本。上海洲和智能科技有限公司为您提供 轨道巡检机器人。重庆工厂巡检机器人定制
上海洲和智能科技有限公司是一家专业提供轨道巡检机器人的公司,有想法的不要错过哦!陕西园区巡检机器人工程
通信接口:通过总线通信方式主要借助分立的控制器(Controller)来实现对中枢控制器连接的架构,各类传感器(Sensor)也是通过这样一种方式从而挂载于通信端口上。而中枢控制器将主要负责对各类数据的采集,并遵循设定的格式对这些数据加以打包传输。而上位机在收到相关指令信息后也会先将数据解析出来然后加以执行。系统电源:主要是指两个部分,即中控机电源以及机器人平台电源。其中针对工控机电源将使用单独的锂电池(12V.40Ah)。考虑到该电池存在电压输出不够稳定,将对其借助DC·DC予以升压处理。平台电源能借助平台实现电压的稳定输出,能满足多个供电需求。陕西园区巡检机器人工程
上一篇: 新疆农村巡检机器人价格
下一篇: 云南智能化巡检机器人物联网系统