上海激光位移传感器找哪家
要想在工作范围内得到好的光斑质量,可采用柱面镜或非球面实现,另外波前编码和切趾法在延拓焦深方面也有很好的效果[3,4],但这样的光学系统相对较复杂,元件较多,不宜装调,成本也会增长。因此,在精度允许的情况下,可考虑全部采用球面镜,不考虑焦深延拓,用变倍的方法实现在40、45、50、55、60mm物距处光斑大小尽量均匀一致。根据光谱分布,设定中心波长权重为3,边缘波长权重为1。要消掉少量的色差,系统至少需要两片镜片。根据以上要求选定了一个初始结构,经过优化得到以下best设计结果。图2为优化后的镜头结构(像距在50mm处)。表1为effective工作范围内轴上视场的光斑大小分布。非接触式位移传感器的出现推动了现有技术的适应,以满足新的测量要求并提高测量的准确性和分辨率。上海激光位移传感器找哪家
传统的接触式平面检测精度低、稳定性差及对对象物检测条件要求苛刻,已逐渐被现代非接触式平面检测所替代。非接触式激光平面检测系统以其高精度、高分辨率及不受对象物材质、颜色或倾斜度的影响等优点,可对任何对象物进行平面检测。介绍系统结构和激光位移传感器的工作机理,并进行平面定性检测和定量检测试验,用OpenGI。绘制及拟合三维曲面。试验结果表明,该系统平面检测结果较好地反映出对象物平面起伏情况,并且达到系统的精度要求。国产激光位移传感器推荐激光位移传感器在3C电子行业中的应用案例。

在一个实施例中,上述感光元件7可以为线阵CCD感光芯片,或者也可以是线阵CMOS感光芯片。在线阵CCD感光芯片或线阵CMOS感光芯片中,包括线形排列的多个感光单元,通常为直线排列,该直线的延伸方向为感光单元的主要排列方向,这些感光单元沿着水平方向(弧矢方向)排列。由于感光单元为直线状排列,因此,长条形光斑可增加与像元之间的接触面积,可降低机械器件形变对所述激光位移传感器信噪比的影响。[0045]在其他实施例中,上述感光元件7可以是面阵CCD感光芯片或面阵CMOS感光芯片。面阵CCD感光芯片或面阵CMOS感光芯片包括排列为矩形的多个感光单元,矩形的长边沿着水平方向(弧矢方向)延伸,短边沿着竖直方向(子午方向)延伸,其长边的延伸方向即为感光单元的主要排列方向。这样,长条形光斑同样更加容易地被面阵CCD感光芯片或CMOS感光芯片接收到。
通过将空间频率为62.5lp/mm时的MTF解析结果保持在MTFS>MTFT×10或MTFT>MTFS×10,尤其是让解析结果满足:MTFS≥0.5且MTFT<0.05、或者MTFT≥0.5且MTFS<0.05,能够让光斑在感光元件的感光单元的主要排列方向上的延伸更加明显,进一步降低成像物镜的设计难度、以及制造和维护成本;对于弧矢方向和子午方向MTF值差距不大的成像物镜,通过在成像物镜前和/或在成像物镜后加入能够引入像散的光学元器件(如平板玻璃等),配合微调成像物镜与所述感光元件之间的相对距离来使得成像物镜和感光元件所组成整体的MTF值满足上述要求,能够很容易地让光斑被拉长,更加容易被感光元件所接收;激光位移传感器可以用于测量机械零件的尺寸和形状。
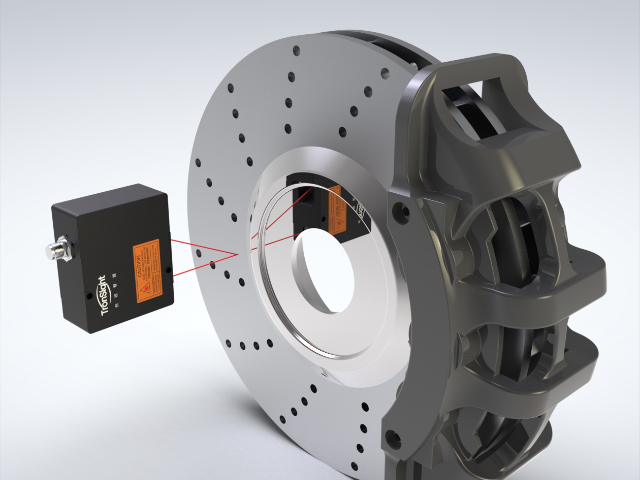
在采用方式2的情况下,可以在成像物镜前或成像物镜6后加入能够引入像散的光学元器件(如平板玻璃),配合调整成像物镜6与感光元件7之间的距离时,可以在微米量级进行调整。每次调整后,可以进行MTF解析,在判断解析结果满足上述条件时,停止调节。如果调整后发现解析结果不满足上述条件,则继续进行调整。此外,在图1所示的实施例中,反光元件8设置在接收物镜6和感光元件7之间,从而可以提高所述激光位移传感器的内部空间利用率,减小其外形尺寸。在所述激光位移传感器外形尺寸允许的情况下,反光元件8可省略。在测量光斑和成像物镜6之间的带通滤光片5被用来滤除或降低杂散光对测量系统的影响。高精度激光位移传感器的可靠性和稳定性也是其优点之一。上饶激光位移传感器免费咨询
高精度激光位移传感器具有较高的精确度,能够满足精密测量的需求。上海激光位移传感器找哪家
加工-测量-再加工-再测量是非球面加工的必要过程。非球面透镜的高精度检测不仅包括非球面表面形状的检测,还包括非球面中心偏差的测量。要求非球面透镜的形状误差在几厘米到几十厘米的范围内小于1μm。受现有冷加工工艺、车床运动误差、磨削力变形及检测误差的限制,加工的非球面光学元件会产生一些质量缺陷,无法保证跨尺度的产品满足高精度要求。为了使非球面透镜表面形状误差、中心偏差等参数满足设计精度要求,往往需要利用被加工非球面工件的中心偏差检测信息进行多误差校正和补偿加工。上海激光位移传感器找哪家
上一篇: 上海激光位移传感器定做
下一篇: 没有了